多様な移動体と人間を繋ぐ進化型コミュニケーション基盤
JST funded research on integrated V2V/V2X communication systems with LLMs and VR simulation technologies
CRONOSプロジェクトについて
CRONOSプロジェクトは、多様な移動体と人間を繋ぐ先進的なコミュニケーションプラットフォームの開発を目指しています。私たちの研究は、V2V/V2Xシステム、大規模言語モデル、VRシミュレーション技術を統合し、次世代のモビリティ環境におけるシームレスで安全な、人間中心のインタラクションを実現することに焦点を当てています。
- 主要目標:信頼性が高く、スケーラブルで、インテリジェントなコミュニケーションフレームワーク
- 研究焦点:V2V/V2X、LLM、VR、人間-移動体AI
プロジェクト目標
相互運用性プラットフォームの構築
基盤モデルを使用した異種通信メッセージのための堅牢なプラットフォームの開発
双方向インタラクションの最適化
人間と移動体AIの間のシームレスなコミュニケーションのためのインタラクションの強化
適応型プラットフォームの開発
多様なニーズとシナリオに対応する進化するコミュニケーションプラットフォームの作成
共創システムの実証
人間-移動体AI共創型交通システムのためのコミュニケーションプラットフォームの展示
Symposium
Time and Place
Program
Member Introduction
Manabu Tsukada
Dr. Manabu Tsukada is currently an associate professor at the Graduate School of Information Science and Technology, the University of Tokyo, Japan. He is also a designated associate professor at the Center for Embedded Computing Systems, Nagoya University, Japan. And He is a visiting professor at Aalto University from February 2021 to November 2021. He received his B.S. and M.S degrees from Keio University, Japan, in 2005 and 2007, respectively. He worked in IMARA Team, Inria, France, during his Ph.D. course and obtained his Ph.D. degree from Centre de Robotique, Mines ParisTech, France, in 2011. During his pre and postdoc research stages, he has participated in a multitude of international projects in the networked ITS area, such as GeoNet, ITSSv6, SCORE@F, CVIS, Nautilus6, or ANEMONE. He served as a board member of the WIDE Project 2014-2022. His research interests are mobility support for the next-generation Internet (IPv6), Internet audio-visual media, and communications for intelligent vehicles.
Takeo Igarashi
Takeo Igarashi is a Professor of Computer Science Department at The University of Tokyo. He received a Ph.D from the Department of Information Engineering at The University of Tokyo in 2000. He joined the Department of Computer Science as an assistant professor in 2002 and was promoted to a professor in 2011. His research interest is in user interfaces and interactive computer graphics in general. He is known for the development of a sketch-based modeling system (Teddy) and a multi-touch shape deformation method. He led a JST ERATO project and a JST CREST project as a director. He served as program co-chair for UIST 2013, general co-chair for UIST 2016, technical papers chair for SIGGRAPH ASIA 2018, and technical program co-chair for ACM CHI 2021. He received the SIGGRAPH Significant New Researcher Award, JSPS Award, CHI Academy Award, and the Asia Graphics 2020 Outstanding Technical Contributions Award.
Hideki Nakayama
Prof. Nakayama has conducted extensive research in both computer vision and natural language processing. His expertise lies in multimodal deep learning, particularly in transparently linking various types of data, such as images and text, to perform recognition, understanding, and generation. Recently, he has been actively working on the development and application of multimodal large language models. To date, he has published over 40 papers at top-tier international conferences, such as ICLR and AAAI (Machine Learning/AI), CVPR, ICCV, and ECCV (Computer Vision), and ACL, EMNLP, and NAACL (Natural Language Processing), all ranked as CORE A*/A. In addition, he has served in key roles such as Area Chair, Senior Area Chair, and Editor for the review systems of these top conferences and journals, establishing himself as a leading researcher in the field both domestically and internationally. Below, we will discuss some of his research outcomes that are particularly relevant to this project.
Lei Ma
Dr. Lei Ma is currently an associate professor with The University of Tokyo, as well as University of Alberta (with a shared appointment in part time from April 2023), leading Momentum Lab (website to be launched). Previously, he held the assistant professor position with Kyushu University from Jan. 2019, and was promoted to associate professor on April 2020. From April 2021, he joined University of Alberta and was honored to be selected as a Canada CIFAR AI Chair, and a Fellow with Alberta Machine Intelligent Institute (Amii), under the Pan-Canadian AI Strategy. From April 2023, he joined The computer science department of The University of Tokyo as an associate professor. His research spans a wide range of research topics, and comes with a special focus centering on the interdisciplinary research fields of Software Engineering and Artificial Intelligence, in the design and development of quality assurance and engineering support for building trustworthy AI systems. In his early career as a student, he received a B.E. degree from Shanghai Jiaotong University (SJTU) in 2009, M.E. and Ph.D. degrees from The University of Tokyo, in 2011 and 2014, respectively. During his Ph.D. program, he studied for half a year in the Mathematics and Computer Science department of Technische Universität München(TUM).
Research Posters
Explore our latest research contributions and findings from the CRONOS project
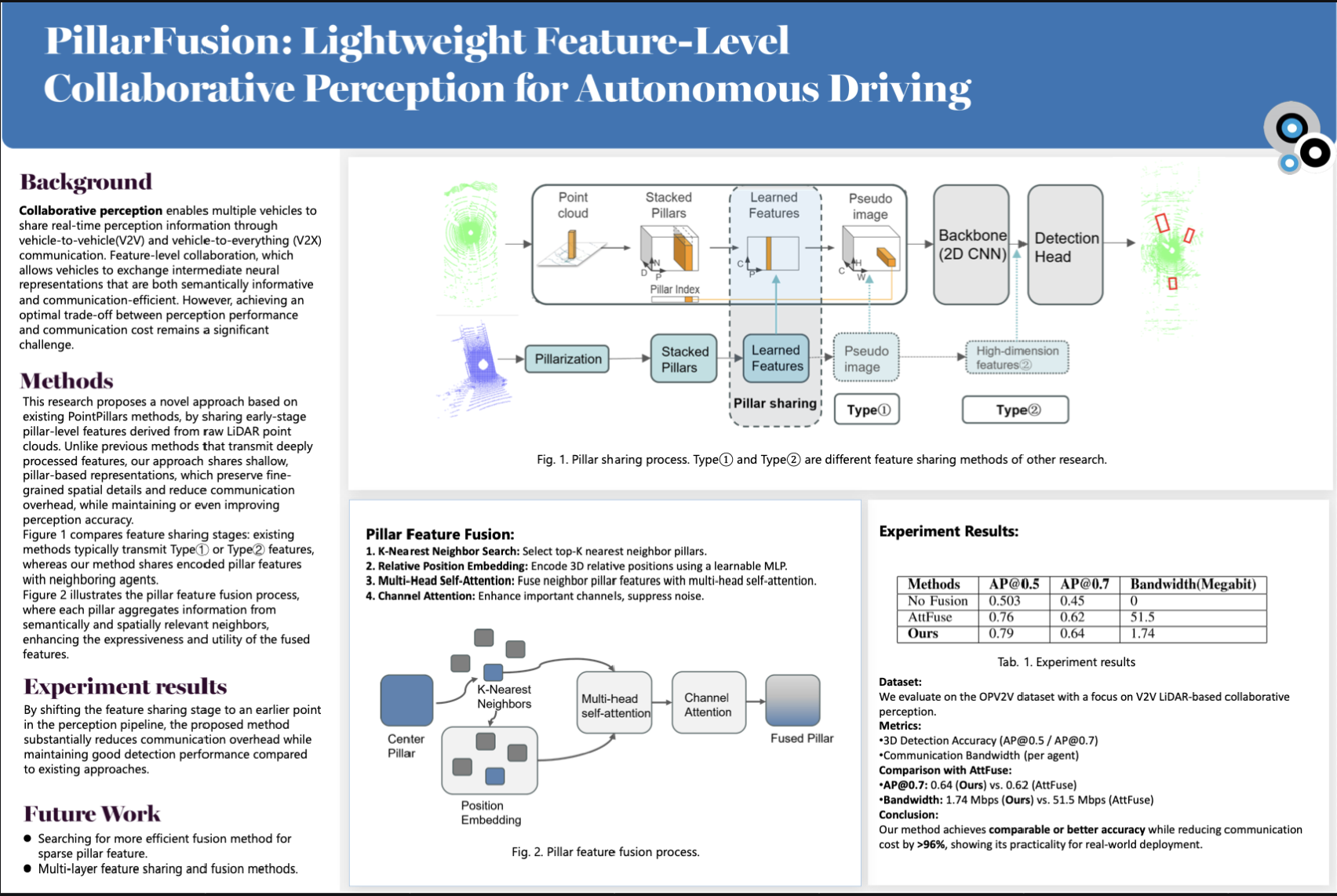
PillarFusion
Lightweight Feature-Level Collaborative Perception for Autonomous Driving
Key Contributions
- • Novel pillar-level feature sharing approach
- • Reduced communication overhead by 96%
- • Maintained detection accuracy
- • Real-world deployment practicality
Research Impact
This work demonstrates the feasibility of lightweight collaborative perception systems for practical V2X deployment in autonomous driving scenarios.
Future Research Poster
Coming Soon
Additional research posters will be showcased here as they become available
Upcoming Research
More exciting research results from the CRONOS project
Research Areas
- • V2X Communication Systems
- • LLM Integration
- • VR Simulation Technologies
- • Human-AI Interaction
Poster Session Information
Research Presentations
Latest findings and methodologies
Interactive Sessions
Direct interaction with researchers
Live Demonstrations
V2X and VR technology showcases
Networking
Connect with academia and industry
Resources
Research Publications
- Dongyang Li; Ehsan Javanmardi; Manabu Tsukada, "State-Guided Spatial Cross-Attention for Enhanced End-to-End Autonomous Driving", In: IEEE International Automated Vehicle Validation Conference (IAVVC 2025), Baden-Baden, Germany, 2025.Proceedings Article | Abstract | BibTeX
- Manabu Tsukada, "V2X Communication Technologies in the Era of End-to-End Autonomous Driving", The 2nd Workshop on Secure connected vehicles: Digital Twin, UAVs, and Smart Transportation, at IEEE IV 2025, 22.06.2025.Presentation | Abstract | Links | BibTeX